
 400-1050-986
400-1050-986 市场资讯
市场资讯新闻资讯 更多+
电液执行器是将控制模块和液压动力模块集成一体,分为直行程、角行程两种。控制模块发出指令到智能可控电动机或伺服阀,控制液压动力模块以线性位移(或角位移)输出力(或力矩),驱动被控对象,并通过位移反馈完成调节过程,实现各种功能控制。目前,市场上的电液执行器主要分为两种:
(1)伺服阀控制式电液执行器:即传统的电液伺服执行器,通常采用开式循环液压系统,通过控制伺服阀调节液压油流动方向及流量大小,实现对被控对象的调节,如德国的Reineke电液执行器;
据中金企信国际咨询公布的《2020-2026年中国电液执行器行业市场研究及投资可行性研究报告》统计数据显示:高精度的电液伺服执行器输出推力大、全行程时间短、响应快、控制精度高、无超调、运行非常平稳、适合于高压差、高黏度介质等严酷工况条件。但其往往需要配套使用一个液压站或者带一套伺服控制系统,体积庞大,对液压油清洁度要求高,往往存在泄漏等问题,而且生产成本、使用成本(能耗和维护费用)高。因而仅在少数需要大驱动力或高精度连续调节控制的时候才使用。
(2)电动机控制式电液执行器:采用闭式循环液压系统,通过调节步进电动机或伺服电动机的转向和转速来控制双向泵压力油输出方向和流量,对被控对象进行精确调控,如韩国RPM、美国REXA等电液执行器。
和传统电液伺服执行器相比,电动机控制式电液执行器,体积小、重量轻;安装、使用方便;生产、使用成本低;只在需要调节时电动机和泵才会启动;性能优越,能达到电液伺服执行器大多数指标。虽然电动机控制式电液执行器有诸多优点,但在大功率、大行程、大惯量、复杂的特性补偿方面无法实现,而传统的电液伺服执行器则有明显的优势。
技术发展历程:液压传动及控制是一种新兴的技术,它被引用到工业领域只有很短的时间。1875年英国人布拉默发明了世界第一台水压机,不仅利用水传递能量,还能传递控制信号,这标志着液压技术工程应用的开始。
液压技术的发展与流体力学的理论成果、工程材料、工作介质等相关学科的研究、发展紧密相连。1650年帕斯卡提出了封闭静止液体中压力传播的帕斯卡原理,1686年牛顿揭示了粘性流体的内摩擦定律,18世纪相继建立了连续方程和伯努利能量方程,这些理论成果是液压技术发展的理论基础。20世纪30年代丁腈橡胶等耐油密封材料的出现,解决了油压传动的密封问题,液压技术逐步完善,并引起了工业界的重视,被推推广应用。20世纪30年代末期-20世纪40年代中期(二战期间),由于军事工业迫切需要反应快、动作准、功率大的液压传动系统及伺服机构,以武装各种军事装备,因此,液压传动及控制技术获得迅速发展。20世纪50年代以来(二战结束以后),液压技术转入民用工业,在机床、工程机械、农业机械、船舶、冶金、轧钢、汽车等行业部门得到了广泛应用,这段时期是液压技术飞速发展的起步期。
在液压传动及控制技术的发展过程中,电液伺服控制和电液比例控制是相继出现的两大重要技术。电液伺服技术首先用于航空,继而应用于一些重要设备的自动控制。电液比例控制技术是介于液压开关控制与电液伺服控制之间的新型电液控制技术,它是针对伺服控制存在的缺点,诸如:功率损失大,对油液过滤要求苛刻,制造和维护费用高等提出来的。又加上一般工业设备对动态响应的快速性要求不高,电液比例控制技术适应了这些要求,从而得到快速发展。
主要产品发展:在化工、石油、冶金、电力等工业过程控制系统中,像液压缸等执行机构是系统中广泛应用的重要部件。可以对系统的压力、流量、温度等参数进行调节。目前常用的执行器按其动力源不同,可分为气动、电动和液压传动三种。
电液执行器与气动及电动执行器的比较:
气动执行器(起于20世纪60-70年代)的执行机构和调节机构是统一的整体,其执行机构有薄膜式、活塞式、拨叉式和齿轮齿条式。采用气体做动力介质,最大的优点是安全性高,对使用环境要求低,可应用于易燃易爆的工作场合。但由于气体的可压缩性,刚度相对较低的气动执行器响应较慢,分辨率欠佳,控制精度低,抗偏差能力较差,应用在动态力或摩擦较大情况下时,极易引起设备的不良振动。且其能-重比差,功率密度低,较大驱动力的气动执行器极其复杂、笨重而昂贵。虽然在高精度控制方面不足,但由于气动执行器安全,易于操作、维护,初始投资省,有较高性价比,在化工、航天等领域应用广泛。
电动执行器(起于20世纪80年代)又称电动执行机构,使用单相或三相电动机驱动齿轮或蜗轮蜗杆输出直线或旋转运动。电动执行器可输出相对恒定的驱动力,高度稳定,抗偏差能力强,控制精度要比气动执行器高,不用借助其他辅助系统可自动保位,但其结构复杂,易发生故障,维护费用高,调节过于频繁会引起电动机发热,减速齿轮易磨损。此外,电动执行器运行缓慢,难于实现大驱动力,且存在过载保护实现困难、不良位置等问题[3]。电动执行器最适合开/关操作,主要应用于动力厂或核动力厂。
电液执行器(起于20世纪90年代)集成了电动操作的简易性、液压的动力快速、固态电子的可靠性和用户配置的灵活性,克服了气动执行器的控制精度低、电动执行器的可控性差等问题,在一定的应用场合和工作环境下,具有无可比拟的优势,因而广泛应用在电厂、石化等比较特殊的场合。
|
|
气动执行器 |
电动执行器 |
电液执行器 |
|
驱动力 |
薄膜式较小,活塞式较大 |
中等 |
较大 |
|
速度 |
较快 |
较慢 |
很快 |
|
行程 |
薄膜式较小,活塞式较大 |
大 |
大 |
|
精度 |
响应较快,精度低 |
响应较慢,精度一般 |
响应快,精度高 |
|
定位 |
对压力振动敏感,稳定性差 |
调节操作时定位精度差 |
定位效果佳,稳定性高,适合高粘度介质 |
|
可用性 |
可靠性和耐用性中等,控制距离相对较近 |
适合开关操作,可用于远距离控制 |
适合精确调节控制,可用于远距离控制 |
|
环境条件 |
影响不大 |
要考虑 |
影响不大 |
|
价格 |
大型产品笨重,价格昂贵 |
较低 |
较高 |
|
安装 |
需要工作现场提供起源 |
简单 |
方便,只需电源和控制信号 |
|
维护 |
较少 |
可靠性低,维护费用高 |
故障率低,可长期免维护 |
1、主要结构和原理:
(1)传统电液伺服执行器:传统电液伺服执行器将油源站与电液伺服系统集成为一体,所有部件如电动机-泵单元、伺服/比列控制阀、液压缸、位置反馈组件、压力表、液位和温度报警传感器、过滤器、溢流阀、单向阀等都安装在容器内部。电动机通常为鼠笼式异步电动机,性能稳定,可满足电液伺服执行器各工况要求,且价格较低。伺服阀为电液伺服执行器的控制核心,既是电液转换元件,又是功率放大元件,其功用是将小功率的电信号输入转换为大功率液压能(压力和流量)输出,能够对输出流量和压力进行连续双向控制,从而实现对执行器位移、速度、加速度和力的控制,动态响应速度快,控制精度高,结构紧凑,广泛用于快速高精度的各类机械设备的液压闭环控制中。
图1双泵供油电液执行器液压原理
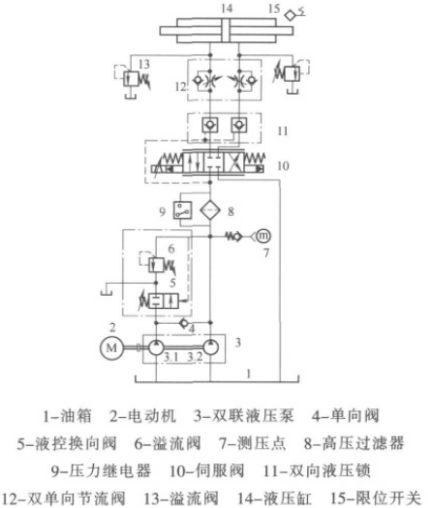
依据伺服阀压力油源供给方式的不同,电液伺服执行器通常又有两种:一种是采用双泵供油,电动机不停的工作,伺服阀始终有压力油供给,以此来保证系统调节的快速性,如Reineke电液执行器,其液压原理如图1所示。另一种采用单泵-蓄能器组合作为伺服阀压力油源,其简化液压原理如图2所示。
图2单泵-蓄能器供油电液执行器液压原理
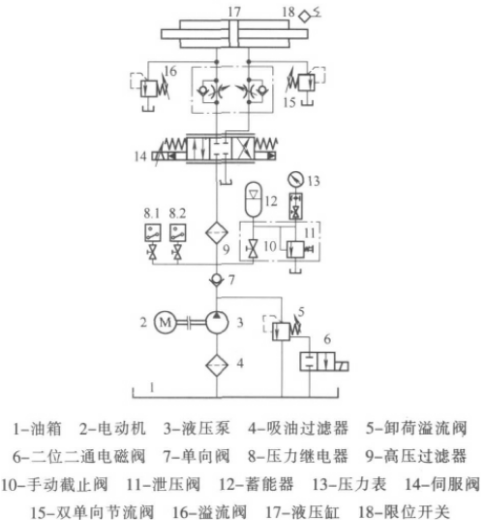
图1所示双泵供油电液伺服执行器依靠电动机2驱动双联泵3经过过滤器8和伺服阀10将液压油送入动力液压缸14中。泵3.2供油到伺服阀,当有小的控制偏差时也供油到动力液压缸。当控制偏差小时,泵3.1由液控换向阀5和溢流阀6控制转换到循环状态,实现其卸荷。在要求大容量动作的情况下,泵3.1也供油到动力液压缸。这样的组合,一方面可确保在大的控制偏差下有足够的油量使活塞以所需要的速度运行;另一方面,保证仅提供所需要的油量来满足要求,避免无功损耗和过多的发热;最重要的是执行器工作时伺服阀始终有压力油源,可保证其调节控制响应速度。
测压点7处接压力表可检测液压泵的输出油压,单向阀4实现双泵合流,双向液压锁11可实现动力液压缸保位,双单向节流阀12为回油节流调速。双向液压锁、双单向节流阀可根据使用情况来决定是否应用。单泵-蓄能器供油电液伺服执行器依据泵和蓄能器规格、伺服阀油源、工作方式的不同又可分为两种:一种是采用定量泵-溢流阀作定压油源;另一种是采用定量泵-蓄能器-卸荷阀作油源。定量泵-溢流阀式执行器(无压力继电器)工作时电动机2不停地运转,通过定压溢流阀5的溢流使供油压力恒定,结构简单,反应迅速,压力变动小。液压源的流量按系统控制流量确定,系统效率低,发热和温升大。利用蓄能器可减小泵的规格,降低系统压力波动和负载流量变化对油源压力的影响。一般适用于中低压电液伺服执行器。
定量泵-蓄能器-卸荷阀式执行器工作时,当蓄能器内的油压达到压力继电器8.1设计上限时,电动机2停止运转,靠蓄能器12储存的高压油来维持执行器的工作,一旦蓄能器内的油压降到8.1下限,电动机自动启动,向蓄能器补充高压油,如自容式电液执行器。过于频繁启动会降低电动机和泵的寿命,根据使用情况,供油压力变动范围也可由压力继电器8.2通过卸荷溢流阀5和电磁阀6控制,泵卸荷时,由蓄能器保压供油。该系统供油压力在一定范围内波动,一般的电液伺服执行器均可适用。可根据使用情况选用或弃用一些液压元件,比如图2中双单向节流阀。
上边所述电液伺服执行器均为闭环控制系统,图3为其控制方框图。
图3电液伺服执行器控制方框图
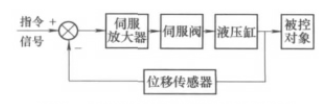
目标位置指令信号和位移传感器反馈信号比较后,产生的偏差信号经伺服放大器放大后输出一个与偏差信号成一定函数关系的控制电流驱动伺服阀,调节液压油流动方向及流量大小,控制液压缸按指定方向运动,实现对被控对象的调节,直到指令信号和反馈信号偏差为零或在容许范围之内,调节过程才会停止。
(2)电动机控制式电液执行器:市场上电动机控制式电液执行器无论是液压系统、控制方式还是工作过程都大同小异,均采用步进电动机或伺服电动机、高精度双向齿轮泵、液压缸、油箱、反馈组件等。所有组件均与外部独立、封闭,高度集成,模块化、小型化设计。
电动机控制式电液执行器简化液压原理如图4所示,为闭式循环液压系统,采用等量泵入/吐出原理进行工作,效率较高。当执行器得到液压缸活塞向上移动的指令信号时,伺服电动机或步进电动机2驱动液压泵3旋转,泵B口输出的压力油经液控单向阀进入双作用液压缸8下腔,推动活塞上移,同时,液压缸上腔回油直接作用在液压泵的吸入口A上,回油背压变为推动液压泵旋转的动力,可减少电动机的功率消耗;当得到相反的指令信号时,电动机驱动液压泵反向旋转,压力油推动活塞下移;当活塞移动到预定位置时,电动机及液压泵停转,双向液压锁6确保动力液压缸原位锁定。电液执行器油压超过溢流阀7设定压力时,溢流阀开启溢流,实现过载保护。由于泄漏、溢流等因素引起循环液压油不足时,系统会产生一定真空,油箱的液压油经过滤器4、单向阀5等被吸入液压泵低压吸油口,补充系统液压油损失,防止气穴等现象的发生。
图4电动机控制式电液执行器液压原理

与电液伺服执行器不同,目标指令信号与位置反馈信号比较放大后控制的是伺服电动机或步进电动机,图5为其控制方框图,通过控制电动机转向和转速来调节双向定量泵的转向和流量输出。
图5电动机控制式电液执行器控制方框图
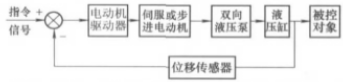
根据设置时确定的行程和信号范围,位置控制处理器把外部送入的指令信号转化为目标位置,执行器的当前位置通过装在执行器上的位移传感器测定。目标位置和当前位置的差值为控制偏差,如果偏差超出了用户设定的死区,执行器将启动电动机,驱动液压泵旋转,调节执行器输出到预定位置,运动到位后电动机及泵停转。
2、技术发展趋势:
液压技术有着极其广泛的工程应用需要,这是现代液压传动及控制技术发展的推动力。1925年液压技术在机床上获得成功应用,50年代到70年代末期,随着古典控制理论的成熟,以反馈控制理论为基础电液伺服系统得到了迅速的发展,各种结构的电液伺服阀相继问世,为工程控制提供了精度高、响应快、大功率的技术设备,逐渐成为武器和航空、航天自动控制以及一部分民用工业设备自动控制的重要组成部分。8D代后期电业伺服技术和电液比例技术得到了迅速发展,尤其是介于控制和伺服控制之间的电液比例技术,它可以直接接受计算机的输入信号来对液压参数进行自动控制,与电液伺服控制相比,又具有可靠、节能和廉价等明显的优势。近年来,通过不断地开发和研究,出现了闭环比例阀,其最重要的特征是阀处于中位时为零遮盖,减小了阀的中区死位,另外还配有位置闭环调节的比例电磁铁及位移传感器,这种阀的稳态和动态性能接近于伺服阀,部分超过伺服阀,例如BOSCH公司的6通径比例方向阀,其工作压力为31.5Mpa,频响约120Hz,滞环0.2%,达到了相当高的控制水平。
液压控制技术还采用了压力反馈、流量反馈、位移反馈、内部反馈、动压反馈和点校正等手段,使液压元件的动、静态品质和工作稳定性有了很大的提高。近年来出现了大量的新型元件,如:高速开关阀、电液数字阀、电液比例阀、电流变阀等,丰富了液压系统的构成。新型的系统结构不断涌现,如电动液压伺服系统。随着近代设备工作精度、响应速度和自动化程度的提高,出现了机电液一体化技术。同时,现代控制策略逐渐渗透到液压技术中,出现了PID控制、自适应控制(AC)、鲁棒控制、II连续性的Bang-Bang控制、Fuzzy控制、智能控制(AI C)、神经网络控制(NN C)等。
总之,现代液压传动及控制技术与微电子技术、计算机控制技术、传感器技术等为代表的新技术紧密结合,形成一个完善高效的控制中枢,成为包括传动、控制、监测、显示乃至校正、预报在内的综合自动化技术。它始终是大功率机械设备和生产线实现自动化不可缺少的基础技术。它在完善发展比例控制、伺服控制、开发数字控制技术以及机电液一体化方面会取得更多的新成就。


